
VixenのSXW赤道儀を3Dプリンター用 ステッピングモータ と GT2プーリー で ベルトドライブ 化して、AstroEQモーターコントローラーに繋げてみました。
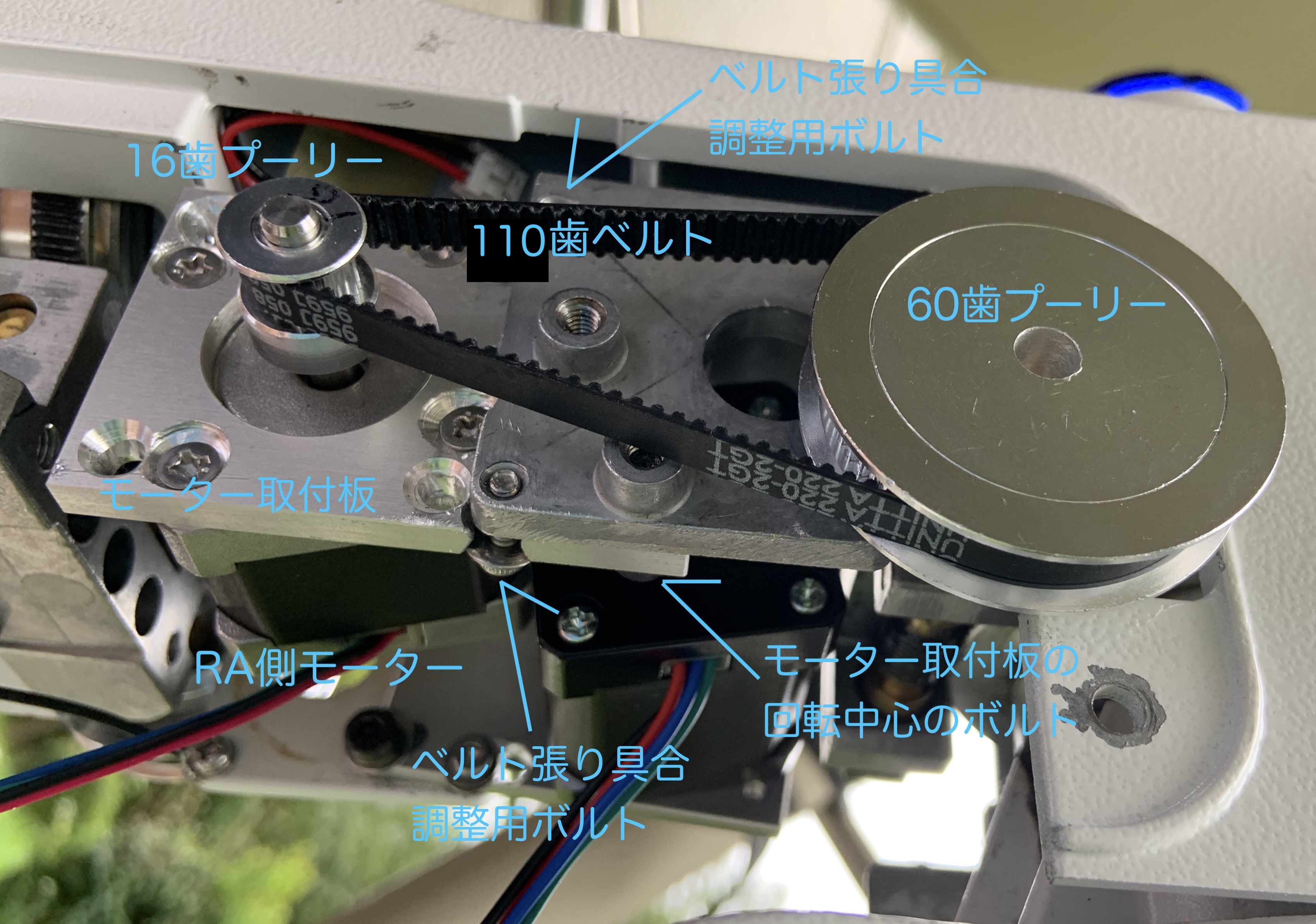
RA側は次の画像のように厚さ5mmのアルミ板を加工してステッピングモーターが取り付くようにしました。プーリーを取り付けた後ベルトの張り具合を調整できるように、モーター取付板を元のモーターやカバー取付用のネジ穴を利用して、3本の六角ボルトで取り付けています。60歯プーリーは軸径5mm用なので、Φ6のドリルで広げました。プーリーが当たるところは赤道儀本体側も削りました。
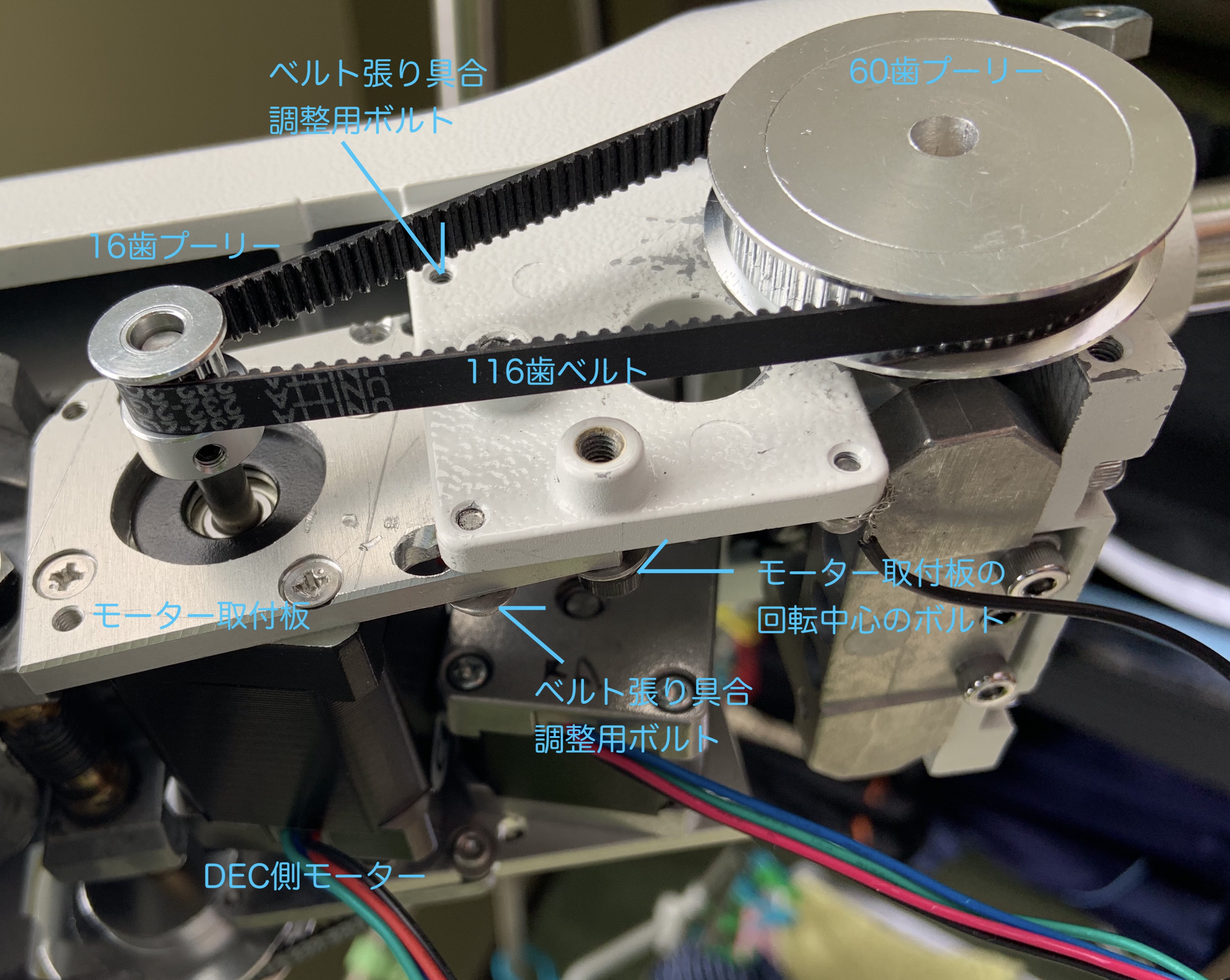
DEC側も同様ですが、ステッピングモーターは、RA側の2倍以上トルクの出るものにしました。このSXWはベランダ設置なのでマルチプレートを使って天頂付近が見えるようにするため、回転モーメントが大きくなりRA側と同じモーターだとトルク小さく脱調が起きるのでトルクの大きなモーターにしました。
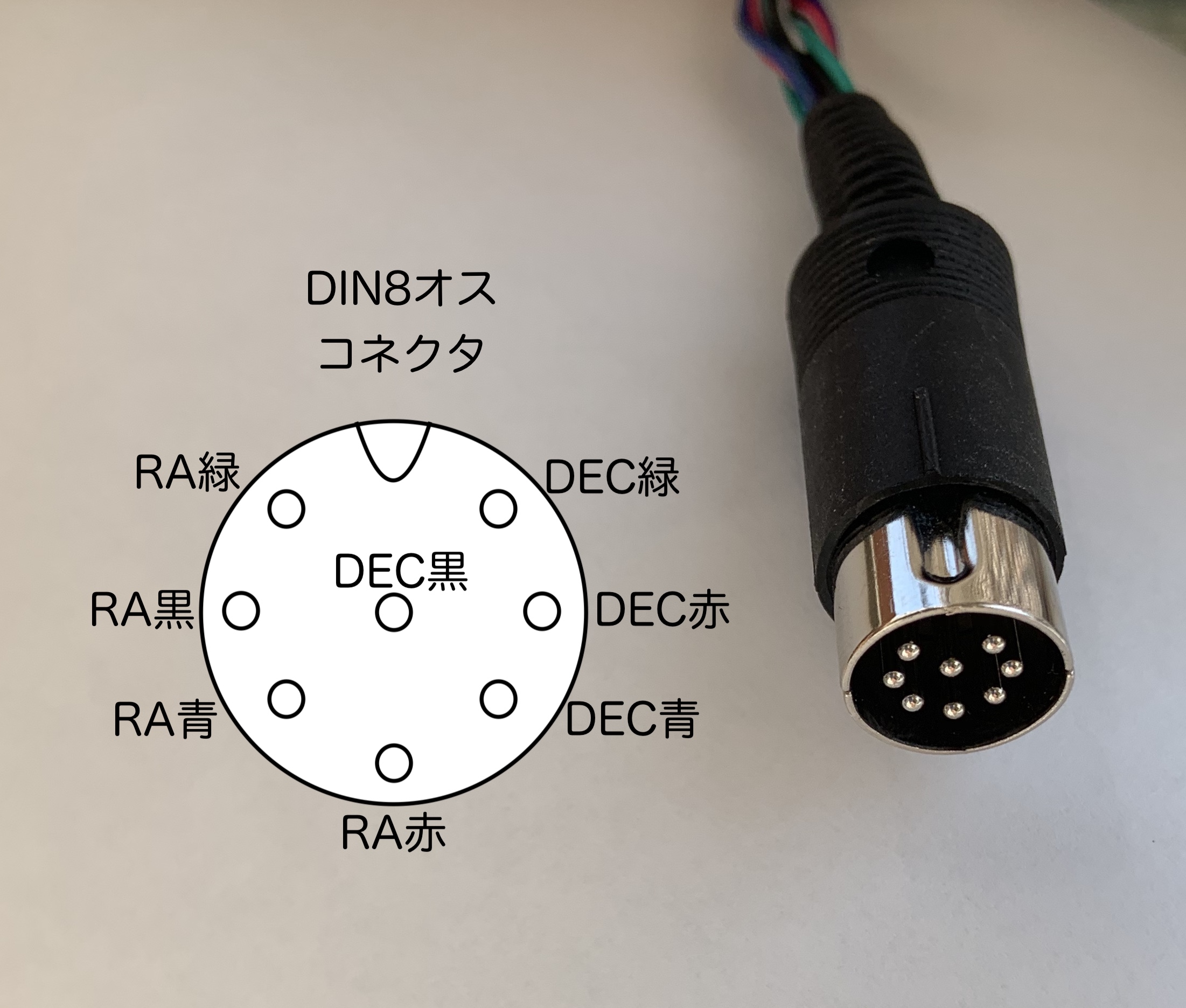
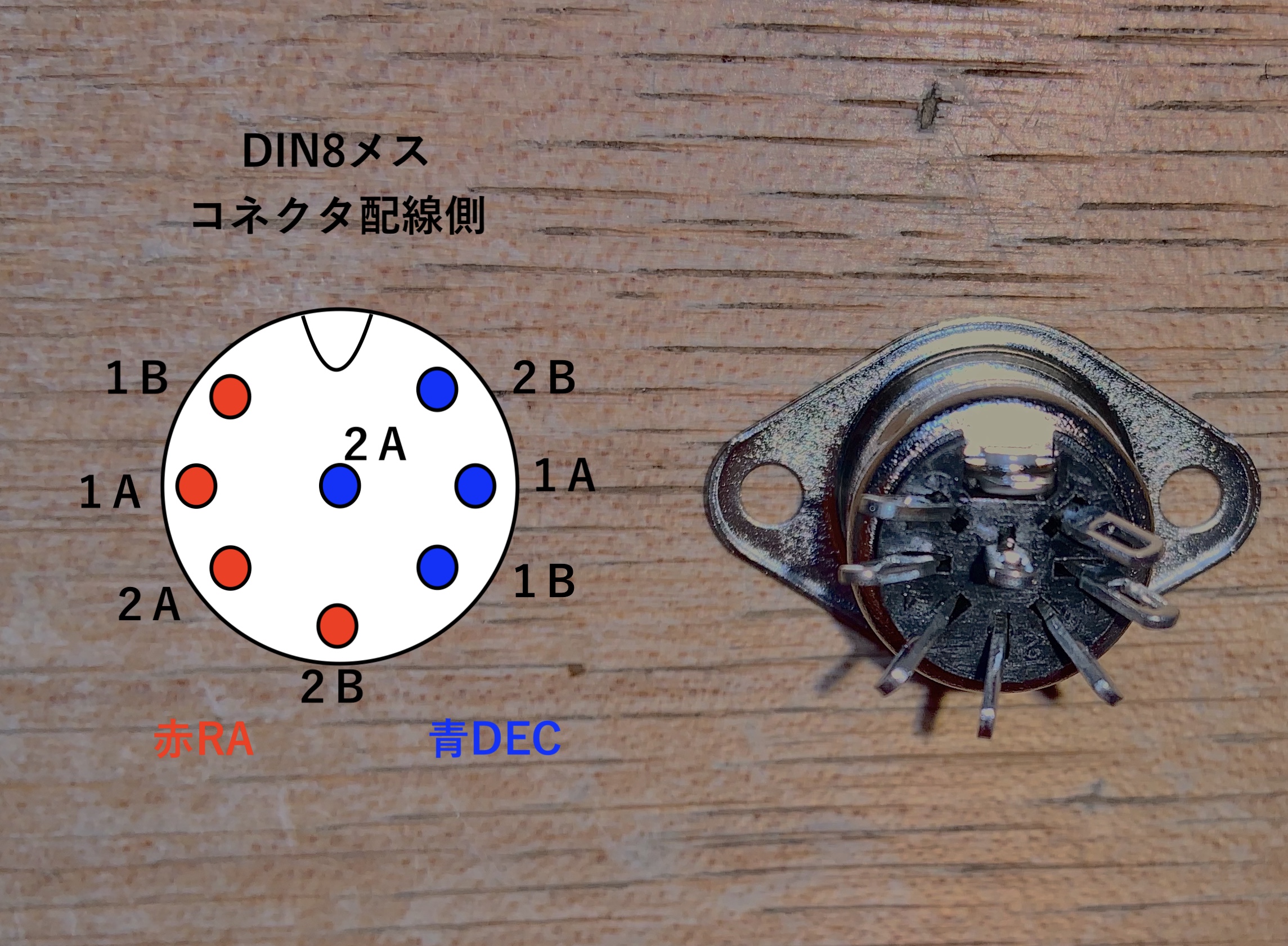
ステッピングモーターの配線は、下図のようにEQ5モーターコントローラーのDIN8コネクターの配線と互換にしました。
駆動部の部品表は以下の通り。
・DEC側 Nema 14 ステッピングモーター バイポーラ 1.8° 40Ncm 1.5A 1台
・RA側 Nema 14 ステッパーモーター バイポーラ 1.8° 18Ncm 0.8A 1台
・タイミングプーリー アルミ GT2 60歯 穴径:5mm 2個
・タイミングプーリー アルミ GT2 16歯 穴径:5mm 2個
・2GT/GT2 タイミングベルト 110歯 220-2GT-6 閉ループゴムベルト220mm 幅6mm 1本
・2GT/GT2 タイミングベルト 116歯 232-2GT-6 閉ループゴムベルト232mm 幅6mm 1本
・40mm x 60mm x t5mm アルミ板 2枚
・ボルト、ワッシャ、DIN8オスコネクタなど
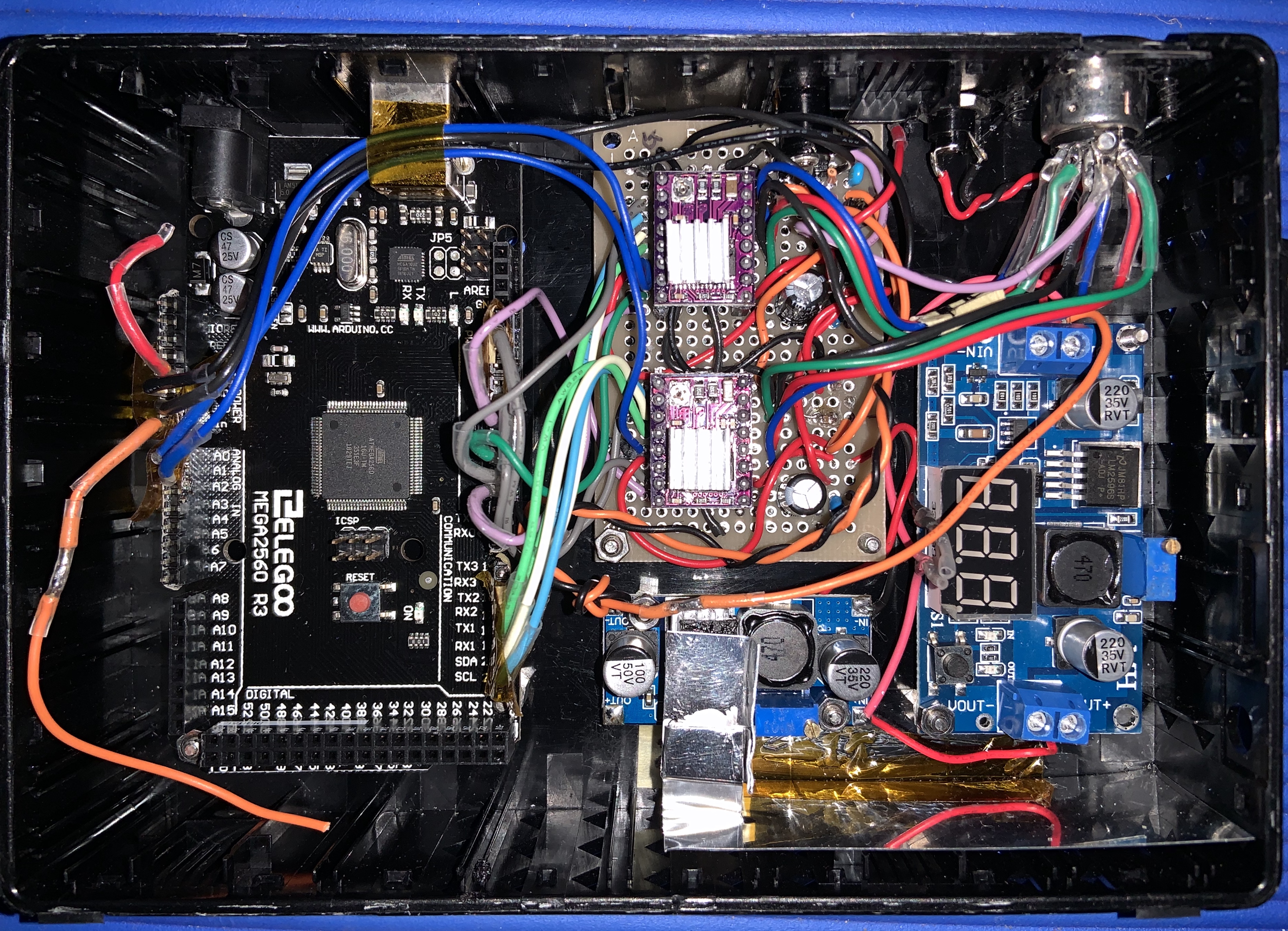
AstroEQモーターコントローラは、Arduino MEGA 2560 とDVR8825 モジュールを使うタイプにしました。AstroEQプロジェクトの参照回路図では、Arduino MEGA 2560ボードの5Vラインから、DVR8825 モジュールへ電源供給していますが、これは絶対やめた方がいいです。DVR8825 モジュールが過負荷で壊れた場合、この5Vラインに負荷がかかり、Arduino MEGA 2560ボードが壊れたことがありました。DVR8824 モジュールへ電源供給は別途12V->5V降圧電源を用意した方が良いです。DRV8825モジュールの電流リミット設定も必ず行いましょう。放熱フィンも付けています。
回路は以下のようになりました。
回路部の部品表は以下の通りです。
・ELEGOO Arduino用 MEGA2560 R3ボード ATmega2560 ATMEGA16U2 1個
・Pololu ステッピングモータードライバDRV8825 2個
・12V->5V降圧レギュレータ・モジュール 1個
・ミスク基板、配線材、ケース、放熱フィン、コネクタなど
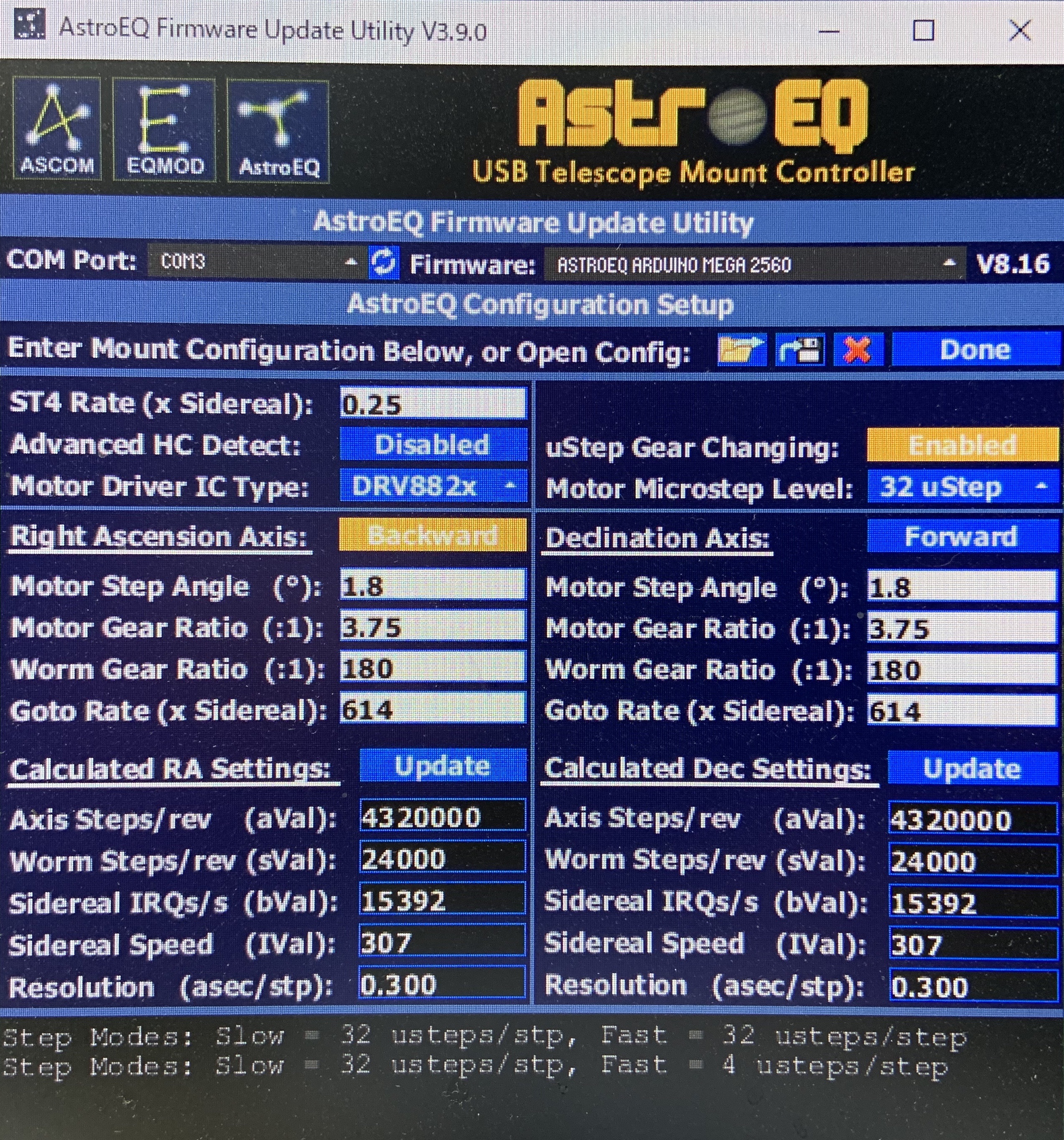
ファームの書き込みパラメータは、以下の通りです。
完成して設置した状態の画像は以下です。アンテナ固定器具を使ってベランダに設置した例です。両サイドのカバーは元のでは閉まらないので、3Dプリンターで作りました。

今まで、GPD赤道儀でEQ5 アップグレードキットを使って撮影していましたが、このSXW赤道儀を使うようになって、ディザリング撮影の必要性が分かり、無料で使えるソフトを探しましたがなかったので自分でディザリング 撮影 用 Windows PowerShell スクリプトを書きました。
*改造すると当然メーカー保証は無くなります。改造・試作等は自己責任で行ってください。
[追記1]AstroEQが半田付け無しで自作できるようになりました。スパゲッティ配線はもう懲り懲りです。
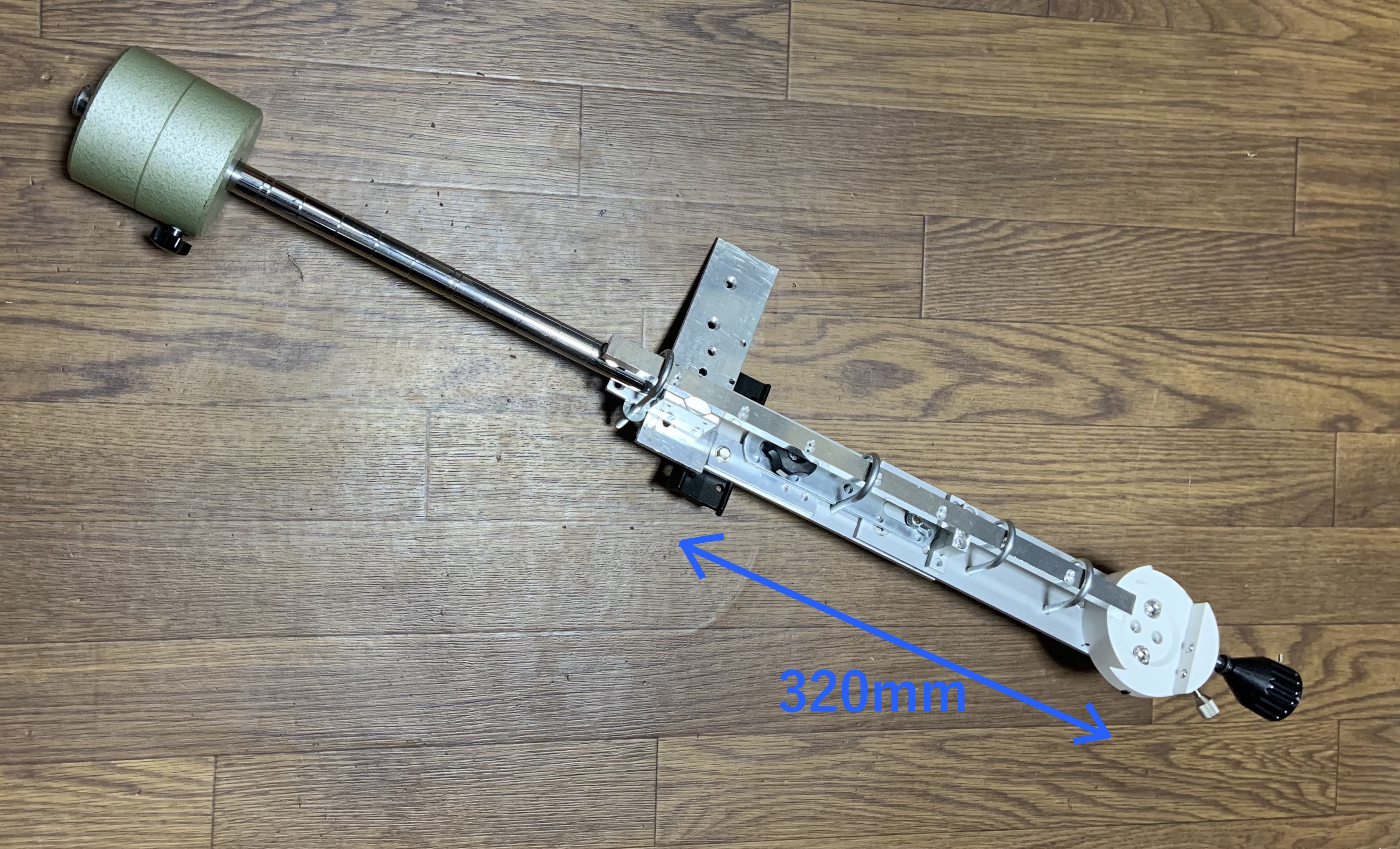
[追記2]この赤道儀にアーム長320mmの自作マルチプレート(下画像)を取付け、笠井BLANCA-72SEDをベランダから外にはみ出させて、天頂付近の網状星雲を撮ったのが作例です。
[作例:網状星雲]
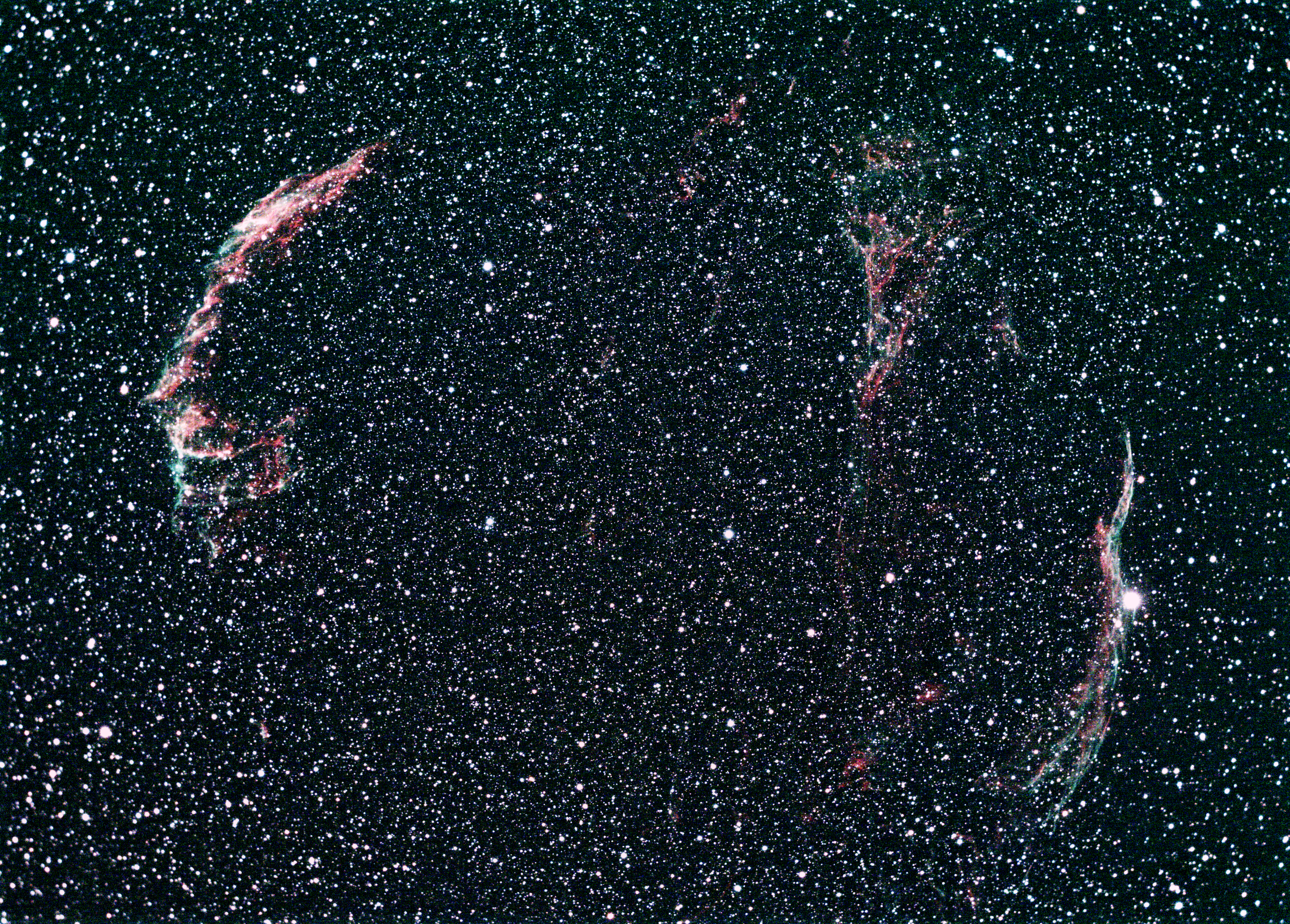
望遠鏡:笠井BLANCA-72SED + Kenko CU4レンズ (合成焦点360mm) + QBフィルター
カメラ:Sony NEX-5(IRフィルタ除去改造) 30秒 x 274枚
ガイド:PHD2、ガイド鏡 f150mm F2.1、QcamPro4000Webカメラ
画像処理:DSSでスタック処理、PS Elements でホワイトバランス・レベル調整、セルフフラット処理、RawTherapeeでLab伸張
撮影地:東京都多摩地区自宅ベランダ 2019年10月1日、2日
不動点から40cmの位置に合計7kg程度載せていますが、星像はほぼ円形で撮影できました。
[追記3]モータドライバーモジュールとコネクタの配線
[追記4]この赤道儀をOnStepにも繋ぎました。 半田付しなくても自作できるってのが素晴らしい。スパゲッティ配線はもう懲り懲りです。最近はOnStepの方がアップデートが多いようです。ハードウェアのバリエーションが多彩で、その分設定が面倒ですが、モータードライバーは256μステップのものも選べます(CPUが高速な時)。
[追記5] 追記1で使っているボードの MKS GEN L V1.0 3Dプリンター統合マザーボードコントローラ は、Ramps1.4シールド と Arduino MEGA2560 を一体化したボードで、USBポートの先にUSB−シリアル変換ICが載っているので、このシリアルはAUXポートに出ているのでSynScanハンドルコントローラを繋げば、AstroEQとはハード的には繋がるはずだが… SynScanハンドコントローラを手放してしまったので試せていません。 (´ω`) どなたか試した方がいらっしゃったら結果を教えて下さい。 自己レスですが、試した結果はこちら。
